
On December 8, 2025, something happened 360 million kilometers from Earth that had never happened before. A robotic rover on Mars drove 689 feet across alien terrain following a route it had not been given by a human. Two days later, it drove another 807 feet. The route planner for both drives was not a person sitting in a control room in Pasadena, California. It was a generative AI model that had analyzed orbital imagery, surface data, and years of accumulated mission knowledge to decide where the rover should go.
NASA's Perseverance rover had just completed the first drives on another world planned entirely by artificial intelligence. The drives took place on the rim of Jezero Crater, a region of Mars where ancient river deltas once deposited sediment into a lake that vanished billions of years ago. The terrain is scientifically fascinating and navigationally treacherous, exactly the sort of environment where a mistake could end a $2.7 billion mission.
The fact that NASA trusted an AI to plan those drives tells us something about how quickly the relationship between human intelligence and machine intelligence is evolving, not just on Earth but across the solar system.
The Problem of Driving on Mars
Driving a rover on Mars has always been an exercise in patience. Radio signals travel at the speed of light, but even light takes between 4 and 24 minutes to cross the distance between Earth and Mars, depending on orbital positions. A command sent from JPL's Rover Operations Center doesn't arrive instantly. And when the rover responds, that signal takes equally long to return. A simple exchange of "turn left" and "I turned left" can consume the better part of an hour.
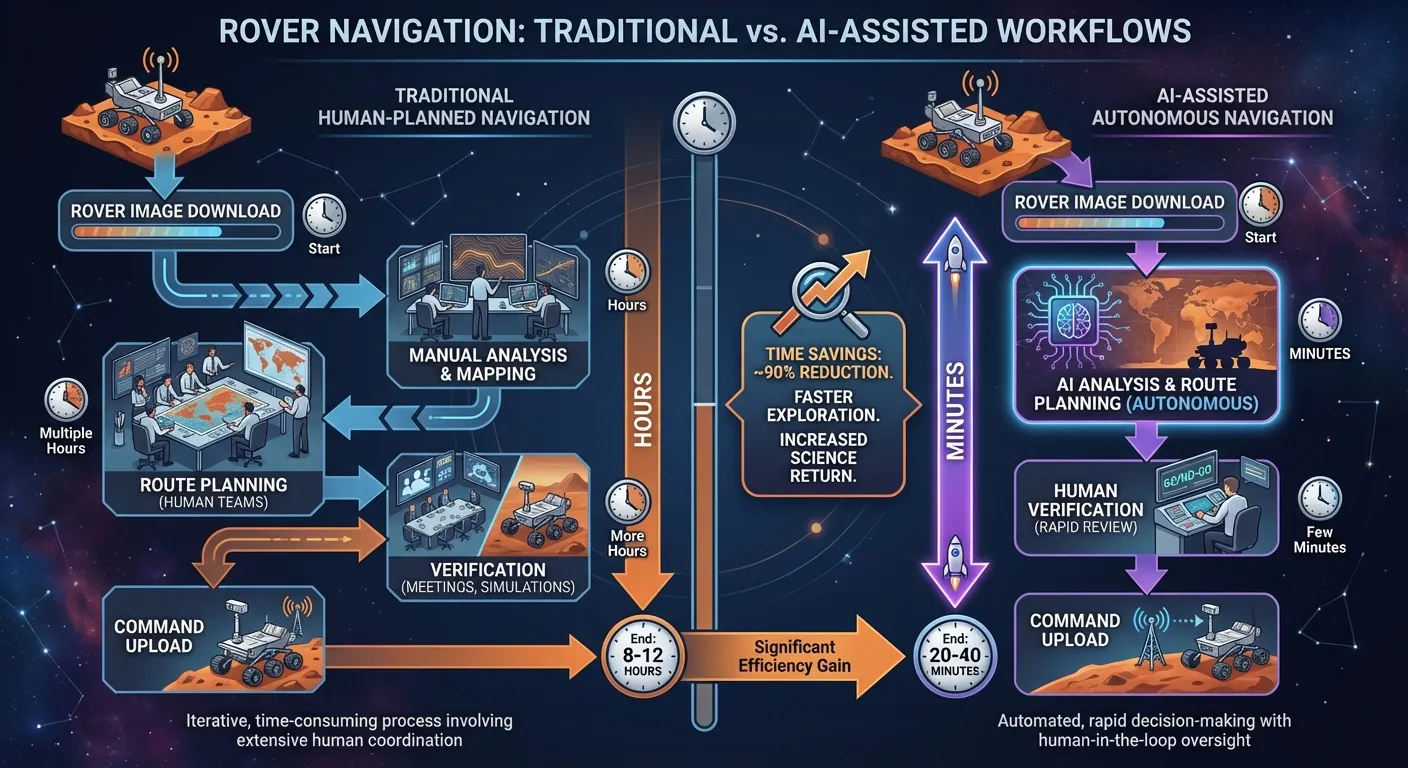
This communication delay makes real-time driving impossible. Instead, rover planners at JPL spend hours each Martian day (called a "sol") studying images the rover sent the previous day, identifying hazards, plotting waypoints, and uploading a detailed set of instructions for the next day's drive. The process is meticulous and effective, but it limits how far the rover can travel. Perseverance typically covers about 100 to 200 meters per sol when humans are directing every move.

Perseverance does have an onboard autonomous navigation system called AutoNav, which has been a genuine breakthrough. AutoNav uses the rover's own cameras to build 3D terrain maps, identify rocks and hazards, and steer around obstacles in real time. According to Tyler Del Sesto, deputy rover planner lead at JPL, AutoNav has been used to evaluate 88 percent of the 17.7 kilometers Perseverance traveled during its first Martian year. It set records for the greatest distance driven without human review (699.9 meters) and the greatest single-day drive (347.7 meters).
But AutoNav handles local navigation: avoiding the rock directly ahead, choosing between two nearby paths. The higher-level question of where to go, which direction to head across kilometers of varied terrain, has always required human judgment. That changed in December 2025.
How Claude Drove a Mars Rover
The December drives were a collaboration between JPL and Anthropic, the artificial intelligence company behind the Claude family of AI models. The JPL team used a type of generative AI called a vision-language model, a system that can analyze images and understand spatial relationships while reasoning about what it sees.
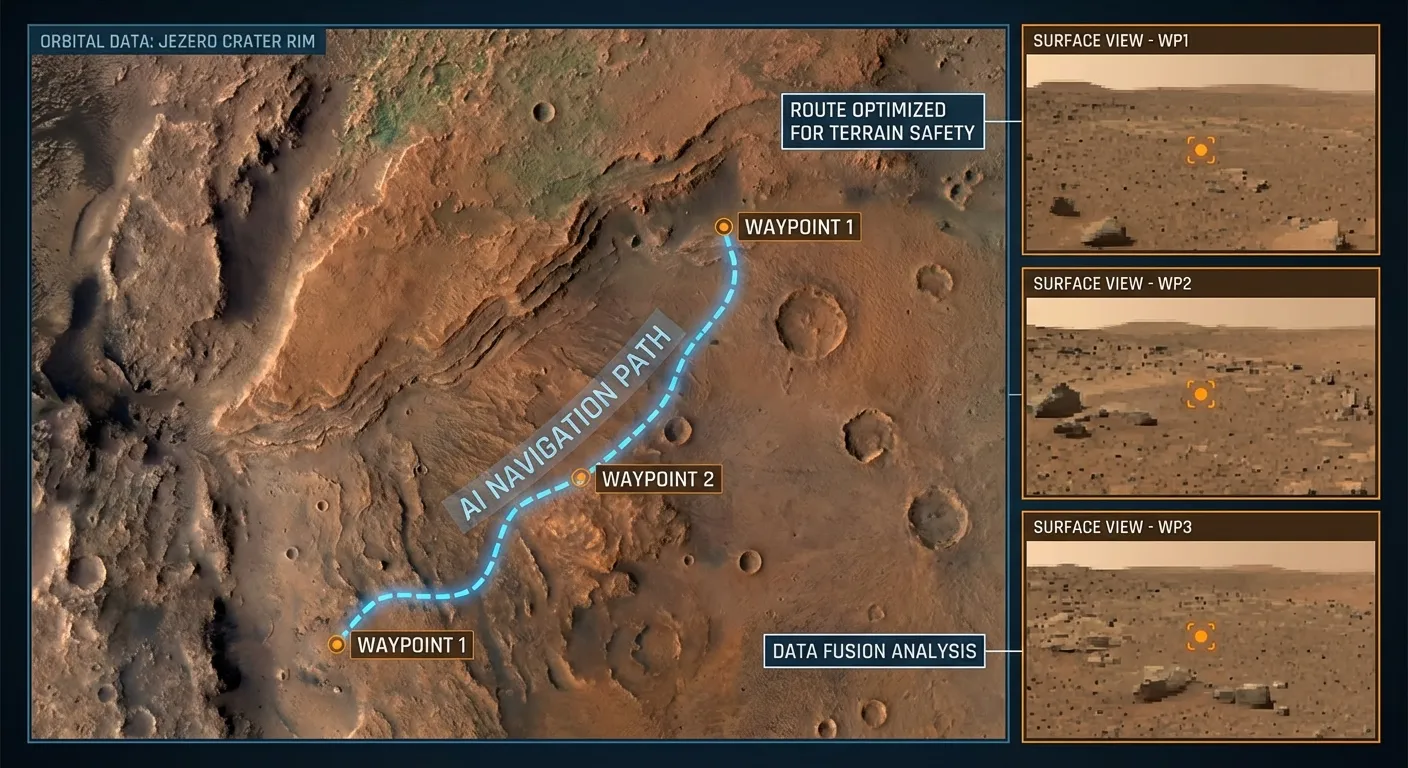
The team fed the AI a substantial dataset: orbital imagery from the HiRISE camera aboard the Mars Reconnaissance Orbiter, surface images from Perseverance itself, and years of accumulated mission data showing what kinds of terrain the rover could safely cross. Using an interface called Claude Code, the JPL team uploaded this data and gave the AI the context it needed to understand Martian terrain at a granular level.
Claude then analyzed the data and planned a route, stitching together roughly 10-meter segments separated by waypoints, the same format human planners use. The AI wasn't just tracing a line on a map. It was evaluating slope angles, rock density, sand stability, and dozens of other variables that determine whether a particular path is safe for a 1,025-kilogram rover with irreplaceable scientific instruments.
The safety verification process was extensive. Before any AI-planned commands reached Mars, the engineering team ran them through JPL's "digital twin," a virtual replica of the rover and its environment that simulated every aspect of the planned drive. The team verified over 500,000 telemetry variables before transmitting commands across interplanetary space. The AI planned the route, but humans verified it could work.
Autonomy's Long Road to Mars
The Perseverance AI drives didn't emerge from nothing. They represent the latest step in a decades-long progression toward greater rover autonomy, a journey that reveals how cautiously NASA approaches any change in how it operates spacecraft.
The first Mars rovers, Sojourner in 1997 and then Spirit and Opportunity starting in 2004, were essentially remote-controlled vehicles. Every move required explicit human commands. Spirit and Opportunity did develop limited autonomous hazard avoidance, but their navigation was fundamentally human-directed. Opportunity's legendary 45-kilometer journey across Meridiani Planum took over a decade, partly because of the communication bottleneck.
Curiosity, which landed in 2012, introduced more sophisticated autonomous capabilities but still relied on human-planned routes for strategic navigation. Perseverance's AutoNav was a significant leap, giving the rover genuine real-time obstacle avoidance. Space roboticist Vandi Verma, a member of the Perseverance engineering team, noted that AutoNav transformed daily operations by allowing the rover to drive faster and farther with less ground intervention.
The AI route-planning demonstration takes this progression into new territory. AutoNav handles tactical decisions (how to get past this particular obstacle), while AI route planning addresses strategic decisions (which direction to head, which terrain to cross, how to sequence the overall traverse). Combining both capabilities points toward rovers that could operate with far less human supervision, covering more ground and doing more science per sol.
What Changes When Rovers Think Ahead
The practical implications extend well beyond driving faster. Mars rover missions are constrained by time. Perseverance has a design lifetime, and every sol spent carefully plotting a drive is a sol not spent analyzing rocks, drilling samples, or investigating unexpected features. If AI can compress the planning cycle, the same mission can accomplish significantly more science.
Consider the numbers. Human planners typically need several hours to plan a single sol's drive. If an AI can produce a comparable plan in minutes, and human reviewers can verify it in an hour, the planning cycle shrinks dramatically. Multiply that time savings across a mission spanning years, and the cumulative effect on scientific output is substantial.
The technology also matters for future missions that will operate even farther from Earth. A rover on Europa, Jupiter's icy moon, would face communication delays of 33 to 54 minutes each way. On Titan, Saturn's largest moon, the delay stretches to roughly 80 minutes. At those distances, waiting for human input between every navigation decision becomes impractical. Autonomous route planning isn't a luxury for outer solar system exploration; it's a necessity.
The connection to lunar lava tube exploration is direct. Robots exploring underground caves on the Moon or Mars will need to navigate without any real-time human guidance, since radio signals cannot easily penetrate rock. The same AI capabilities being tested on Perseverance could enable subterranean exploration that is currently impossible.
There are also implications for how we think about space exploration more broadly. The Mars helicopter Ingenuity, which flew autonomously on Mars from 2021 to 2024, demonstrated that autonomous systems could operate reliably in alien environments. Perseverance's AI drives extend that principle to surface navigation, another domain where autonomy expands what missions can achieve.
The Trust Question
Trusting an AI to drive a rover on Mars raises questions that go beyond engineering. The 500,000-variable verification process JPL used reflects a deeply cautious approach, and for good reason. There is no roadside assistance on Mars. If the rover drives into a sand trap or tips over on a steep slope, the mission could end. The Spirit rover became permanently stuck in soft soil in 2009, a fate that haunts every subsequent Mars mission.
JPL's approach offers a model for how humans and AI systems might collaborate on high-stakes tasks. The AI does the computationally intensive work of analyzing terrain and generating route options. Humans review the output, applying judgment about risks the AI might not fully appreciate. The digital twin provides a final check, simulating the drive before it happens. The result is a system that combines the speed of AI analysis with the caution of human oversight.
Vandi Verma framed it precisely: "The fundamental elements of generative AI are showing a lot of promise in streamlining the pillars of autonomous navigation for off-planet driving: perception, localization, and planning and control." Notice the word "streamlining." The AI isn't replacing human expertise. It's amplifying it, handling the data-intensive portions of the workflow so that human planners can focus on the decisions that require deeper judgment.
Where This Leads
The Perseverance AI drives mark a turning point, but they're also just a beginning. The two test drives covered a combined 1,496 feet. Thousands of kilometers of Mars remain to be explored. Future rovers will need to traverse terrain far more challenging than Jezero Crater's rim, and they'll need to do it faster, with less oversight, and in environments where communication blackouts make human-in-the-loop planning impossible for days at a time.
The technology will improve. Vision-language models are advancing rapidly on Earth, and each improvement can potentially be applied to space exploration. Future AI systems may be able to plan not just drives but entire scientific campaigns: identifying interesting geological features, deciding which samples to collect, and prioritizing observations based on scientific value. The rover becomes less of a remote-controlled tool and more of an autonomous scientific partner.
This shift also changes the economics of space exploration. If rovers can operate more autonomously, missions don't need as large a ground team managing daily operations. The savings could fund additional missions, extending humanity's robotic presence across the solar system. An AI that can plan a safe drive across Mars today might plan a traverse across Europa's ice shell tomorrow.
What happened in December 2025 was quietly revolutionary. For two days, an artificial intelligence planned where a robot should drive on another planet, and it worked. The rover drove safely, covered new ground, and sent back data. The humans who built the system verified every step, but the creative act of route planning, of looking at alien terrain and deciding "go this way," belonged to the machine. On a planet where no human has ever set foot, an AI just took its first steps.